-
Research Centers(R&D)
-
Research Center for Robot and Automation Equipment
-
Research Center for Sand Industry Engineering Equipment
-
Research Center for Lubrication Technology
-
Lubrication and Friction Testing Center
-
Research Center for Surface Engineering
-
Research Center for Surface/Interfacial Micro/Nano-technology
-
Research Center for Advanced Energy Equipment Technology
-
Research Center for Laser Engineering
-
Research Center for Additive Manufacturing Technology and Engineering
-
Research Center for Heavy Machinery Technology
-
Research Center for Microfluidic Systems Design and Manufacture
-
Research Center for Electromagnetic Strengthing for Tools and Bearings
-
Research Center for Intelligent Security Technology and Equipment
-
Research Center for Advanced Bearing and Rotating Machinery
-
Research Center for WIT120 and Medical Equipment
-
Research Center for Test Equipment and Technology
-
Research Center for Biomedical Equipment
-
Research Center for Wheel-Rail Relationship and Maintenance
-
Research Center for Industryh Automation and Equipment
-
Research Center for Advanced Retarder for Vehicle
-
Research Center for the Fulcrum Forcing Equipment and Forming Technology
-
Research Center for Flight Control
-
Research Center for Industry 4.0
-
Research Centre of Embedded System and IoT
-
Research Center for Micro & Nano Energy Technology
-
Research Center for Power Transmission
-
Research Center for Marine Information and Intelligent Equipment
-
Research Center for Optics and Electronics
-
Research Center for Composite Manufacturing and Intelligent Identification
-
Research Center for High Performance Titanium Alloy Preparation
-
Research Center for Intelligent Materials and System
-
Research Center for Digital Smart Equipment
-
-
Research Centers(Industry)
lxwm

-
Research Centers(R&D)
-
Research Center for Robot and Automation Equipment
-
Research Center for Sand Industry Engineering Equipment
-
Research Center for Lubrication Technology
-
Lubrication and Friction Testing Center
-
Research Center for Surface Engineering
-
Research Center for Surface/Interfacial Micro/Nano-technology
-
Research Center for Advanced Energy Equipment Technology
-
Research Center for Laser Engineering
-
Research Center for Additive Manufacturing Technology and Engineering
-
Research Center for Heavy Machinery Technology
-
Research Center for Microfluidic Systems Design and Manufacture
-
Research Center for Electromagnetic Strengthing for Tools and Bearings
-
Research Center for Intelligent Security Technology and Equipment
-
Research Center for Advanced Bearing and Rotating Machinery
-
Research Center for WIT120 and Medical Equipment
-
Research Center for Test Equipment and Technology
-
Research Center for Biomedical Equipment
-
Research Center for Wheel-Rail Relationship and Maintenance
-
Research Center for Industryh Automation and Equipment
-
Research Center for Advanced Retarder for Vehicle
-
Research Center for the Fulcrum Forcing Equipment and Forming Technology
-
Research Center for Flight Control
-
Research Center for Industry 4.0
-
Research Centre of Embedded System and IoT
-
Research Center for Micro & Nano Energy Technology
-
Research Center for Power Transmission
-
Research Center for Marine Information and Intelligent Equipment
-
Research Center for Optics and Electronics
-
Research Center for Composite Manufacturing and Intelligent Identification
-
Research Center for High Performance Titanium Alloy Preparation
-
Research Center for Intelligent Materials and System
-
Research Center for Digital Smart Equipment
-
-
Research Centers(Industry)

Research Centers
Research Center for Industryh Automation and Equipment
- Categories:Research Centers(R&D)
- Author:
- Origin:
- Time of issue:2016-07-18
- Views:0
(Summary description)IntroductionThemainresearchareas:industrialautomation,specialindustryrobots,non-destructivetestingtechnologyandequipment,numericalsimulationonlarge-scalecastingandforging,etc. CoreTechnology AMagneticAdsorptionClimbingWallRobotwithSurfaceAdaptiveCapability[PatentNumber:ZL200510086382.5] Anon-contactmagneticadsorptionwheel-typewallclimbingrobot[PatentNumber:ZL200510086383.X] Amulti-bodymagneticadsorptiontypeadaptivewallclimbingrobot[PatentNumber:ZL201010539365.3] Gapmagneticadsorptiontypecurvedsurfacemorphologydetectionrobotandcurvedsurfacemorphologymeasuringmethod[PatentNumber:ZL201110083290.7] Gyroscopicdriftestimationcompensationmethodanddevicebasedonrotationofinertialmeasurementunit[PatentNumber:ZL201310750475.8] Flawidentificationmethodforradialultrasonicautomaticflawdetectionofshaftparts[PatentNumber:ZL201310111062.5] Flawidentificationmethodforradialultrasonicautomaticflawdetectionofshaftparts[PatentNumber:ZL201310488047.2] IndustrializationProcess?Specialrobotdevelopedforproducingshaped?Non-destructivetestingtechnologyandequipment?Thelaserlightsourcelightingtechnologyandproduct?ResearchonIntelligentweldingtechnologyandequipment?Researchonlarge-scalecastingandforgingbasicmaterialsandnumericalsimulation?ResearchonIntelligentManufacturingandWorkshopAutomationEquipment Thelaserlightsourcelightinginfieldtesting. Numericalsimulationonlarge-scalecastingandforging ContactInformationAddress:BuildingNo.4,TI-Park,HongshunRoad,HuamingHi-TechZone,DongliDestrict,Tianjin,P.R.ChinaPostcode:300300ContactPerson:ZouWeiMobil:18622987010Email: zouwei@tsinghua-tj.org
Research Center for Industryh Automation and Equipment
(Summary description)IntroductionThemainresearchareas:industrialautomation,specialindustryrobots,non-destructivetestingtechnologyandequipment,numericalsimulationonlarge-scalecastingandforging,etc. CoreTechnology AMagneticAdsorptionClimbingWallRobotwithSurfaceAdaptiveCapability[PatentNumber:ZL200510086382.5] Anon-contactmagneticadsorptionwheel-typewallclimbingrobot[PatentNumber:ZL200510086383.X] Amulti-bodymagneticadsorptiontypeadaptivewallclimbingrobot[PatentNumber:ZL201010539365.3] Gapmagneticadsorptiontypecurvedsurfacemorphologydetectionrobotandcurvedsurfacemorphologymeasuringmethod[PatentNumber:ZL201110083290.7] Gyroscopicdriftestimationcompensationmethodanddevicebasedonrotationofinertialmeasurementunit[PatentNumber:ZL201310750475.8] Flawidentificationmethodforradialultrasonicautomaticflawdetectionofshaftparts[PatentNumber:ZL201310111062.5] Flawidentificationmethodforradialultrasonicautomaticflawdetectionofshaftparts[PatentNumber:ZL201310488047.2] IndustrializationProcess?Specialrobotdevelopedforproducingshaped?Non-destructivetestingtechnologyandequipment?Thelaserlightsourcelightingtechnologyandproduct?ResearchonIntelligentweldingtechnologyandequipment?Researchonlarge-scalecastingandforgingbasicmaterialsandnumericalsimulation?ResearchonIntelligentManufacturingandWorkshopAutomationEquipment Thelaserlightsourcelightinginfieldtesting. Numericalsimulationonlarge-scalecastingandforging ContactInformationAddress:BuildingNo.4,TI-Park,HongshunRoad,HuamingHi-TechZone,DongliDestrict,Tianjin,P.R.ChinaPostcode:300300ContactPerson:ZouWeiMobil:18622987010Email: zouwei@tsinghua-tj.org
- Categories:Research Centers(R&D)
- Author:
- Origin:
- Time of issue:2016-07-18
- Views:0
Introduction
The main research areas: industrial automation, special industry robots, non-destructive testing technology and equipment, numerical simulation on large-scale casting and forging , etc.
Core Technology
- A Magnetic Adsorption Climbing Wall Robot with Surface Adaptive Capability [Patent Number:ZL200510086382.5]
- A non-contact magnetic adsorption wheel-type wall climbing robot [Patent Number:ZL200510086383.X]
- A multi-body magnetic adsorption type adaptive wall climbing robot [Patent Number:ZL201010539365.3]
- Gap magnetic adsorption type curved surface morphology detection robot and curved surface morphology measuring method [Patent Number:ZL201110083290.7]
- Gyroscopic drift estimation compensation method and device based on rotation of inertial measurement unit [Patent Number:ZL201310750475.8]
- Flaw identification method for radial ultrasonic automatic flaw detection of shaft parts [Patent Number:ZL201310111062.5]
- Flaw identification method for radial ultrasonic automatic flaw detection of shaft parts [Patent Number:ZL201310488047.2]

Industrialization Process
▶ Special robot developed for producing shaped
▶ Non-destructive testing technology and equipment
▶ The laser light source lighting technology and product
▶ Research on Intelligent welding technology and equipment
▶ Research on large-scale casting and forging basic materials and numerical simulation
▶ Research on Intelligent Manufacturing and Workshop Automation Equipment
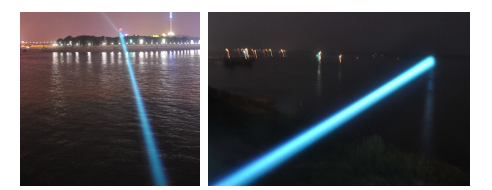
The laser light source lighting in field testing.
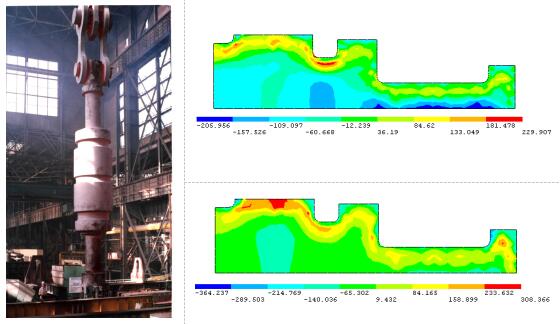
Numerical simulation on large-scale casting and forging
Contact Information
Address:Building No.4, TI-Park , Hongshun Road, Huaming Hi-Tech Zone, Dongli Destrict, Tianjin, P.R.China
Postcode: 300300
Contact Person: Zou Wei
Mobil: 18622987010
Email: zouwei@tsinghua-tj.org
Scan the QR code to read on your phone
二维码

版权所有
Copyright © 2016. TIANJIN RESEARCH INSTITUTE FOR ADVANCED EQUIPMENT All rights reserved.
Powered by www.300.cn 津ICP备17005411号-1
友情链接